|

Constant Speed Power Pack
このパワーパックは、CPUボードにPSoC4の開発キット(CY8C-KIT-042)を使用し、上段にはPSoC4にそのまま差し込めるドライバI/Oボードを作製しました。
ドライバボードには車両駆動用ドライバがあり、パワーパック内で車両速度をフィードバックできるようになっています。
定速走行、低速走行が他のパワーパックに比較して群を抜いています。
その他にポイント用ドライバ2点、車両通過センサー2点を有しており、PSoC4のソフトを作成することで自動運転が可能です。
ドライバボードについての詳細は。。。
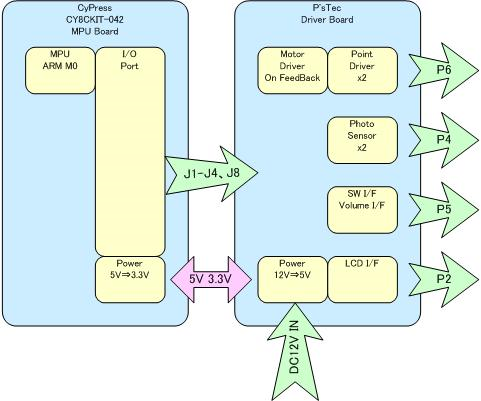
パワーパック構成
 | 基本構成はCypressのCPUボード + P'sTecのDriver Boardになります。 |
 |
+ |
 |
| CPU Board CY8CKIT-042 (Cypress) |
|
Driver Board (P'sTec) |
 |
外部接続コネクタピン配
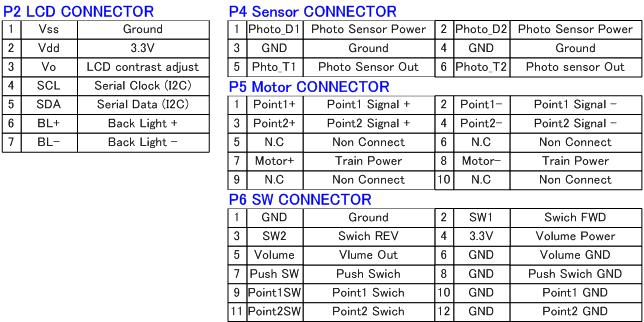
接続コネクタは全て2.54ビッチのピンヘッダになりますので、相手型はピンソケットを使用します。 |
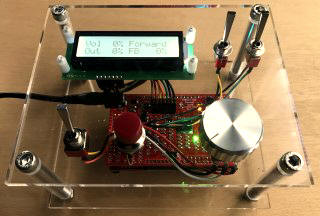
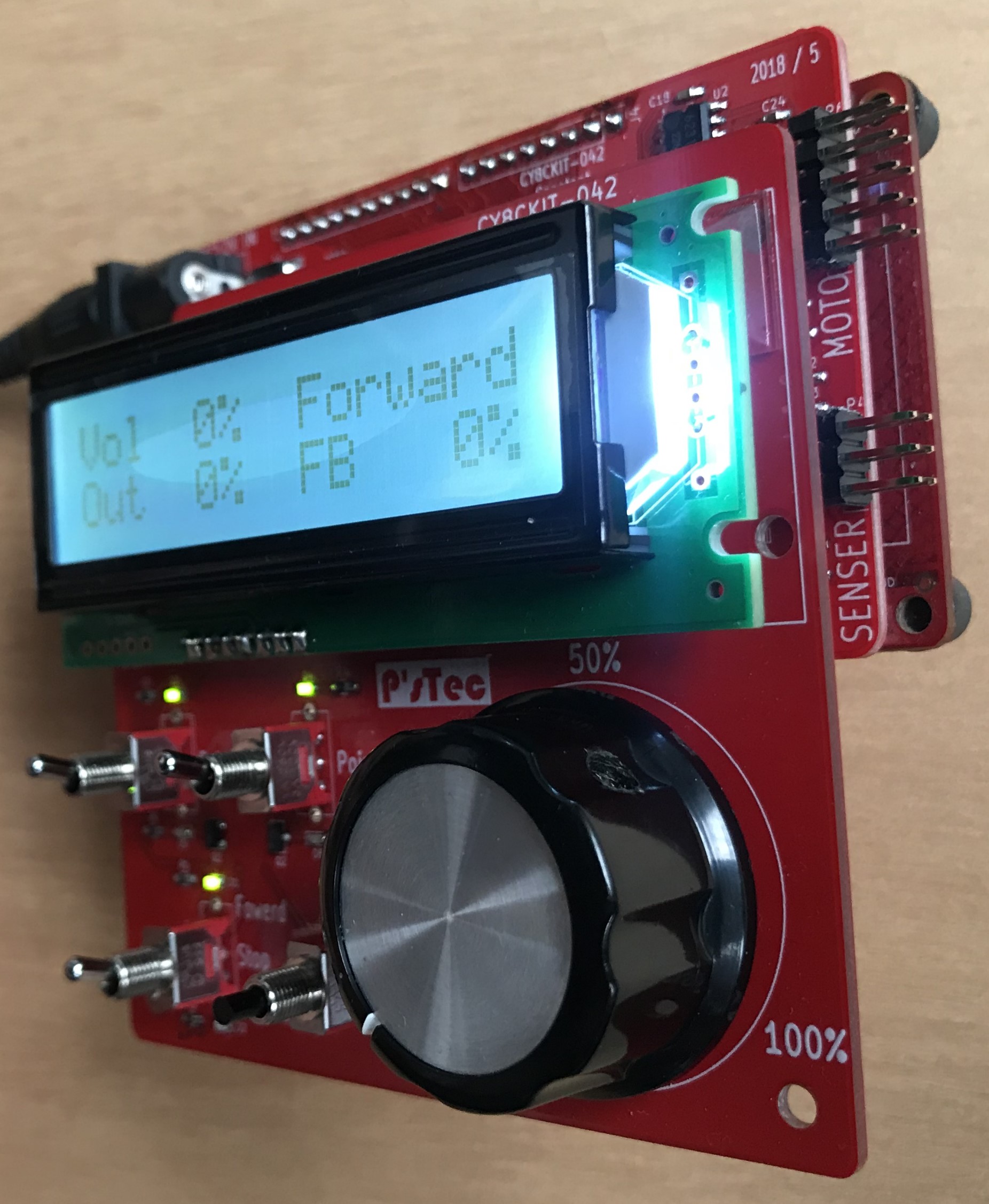
| 基本構成にLCDとスイッチ、ボリュームを配線し、ACアダプタから12Vを接続する事でオリジナルパワーパックの完成になります。 |
|
+ |
|
+ |
 |
= |
 |
| CPU Board CY8CKIT-042 (Cypress) |
|
Driver Board (P'sTec) |
|
SW LCD Volume etc. |
|
|
| 又はスイッチ、ボリュームの配線が面倒、なるべく小さく纏めたいという時にはKey Boardの用意もあります。 |
| Driver Boardの上コネクタにKey Boardを差し込むだけでパワーパックの完成です。 |
|
+ |
|
+ |
 |
= |
 |
| CPU Board CY8CKIT-042 (Cypress) |
|
Driver Board (P'sTec) |
|
Key Board (P'sTec) |
定速走行動画
PWM制御のKATO StandardSXの比較の動画
どちらの動画も上りでほぼ同じ速度にしています。
P'sTec CSPower Pack
|
通過時間 |
速度 |
スケール速度 |
平坦比 |
| 平坦路 |
3.667s |
0.243km |
36.5km |
|
| 登り |
3.900s |
0.229km |
34.3km |
94.0% |
| 下り |
3.233s |
0.276km |
41.4km |
113.4% |
KATO Standard SX
|
通過時間 |
速度 |
スケール速度 |
平坦比 |
| 平坦路 |
2.433s |
0.367km |
55.0km |
|
| 登り |
3.900s |
0.229km |
34.3km |
62.4% |
| 下り |
1.967s |
0.454km |
68.1km |
123.7% |
P'sTecのパワーパックはPWMを上り、下りで約10%前後出力補正していますが、一般のパワーパックではこのような出力補正は行っていないため20%以上の速度変化が出てしまいます。
特に貨車、客車を多くけん引する場合には大きく影響してきます。
また今回使用したKATOのパワーパックもPWM制御のため低速に強いとされているもので今回の結果となりますので、電圧制御パワーパックでは更に差が開いていたと思います。
定速&低速走行動画
一般的にここまで低速で走行させると必ず上りでは止まってしまったり、下りでは貨車の重みでジェットコースターの様に加速してしまいます。
| 

