![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 仕様 | |||
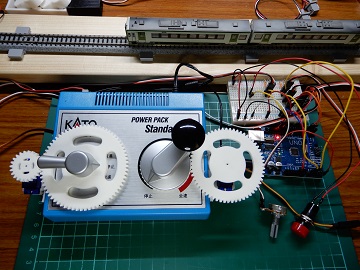 |
外観 |
ベース KATO Power Pack Standard S MPU Arduino UNO |
写真では実験のため、 ブレットボードに下記回路を組んでいます。 |
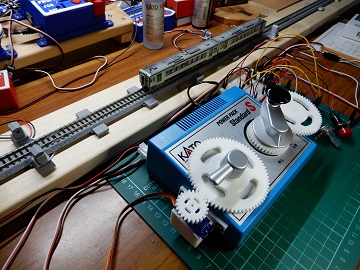 |
全体像 |
センサ 赤外ダイオードと 赤外トランジスタ |
線路両端に赤外センサを配置し、センサが検出すると、サーボモータでPowerPackを減速停止させます。 一定時間経過後にもう一つのサーボモータを反転動作させます。 さらにサーボモータを動かし目標速度まで動作させます。
|
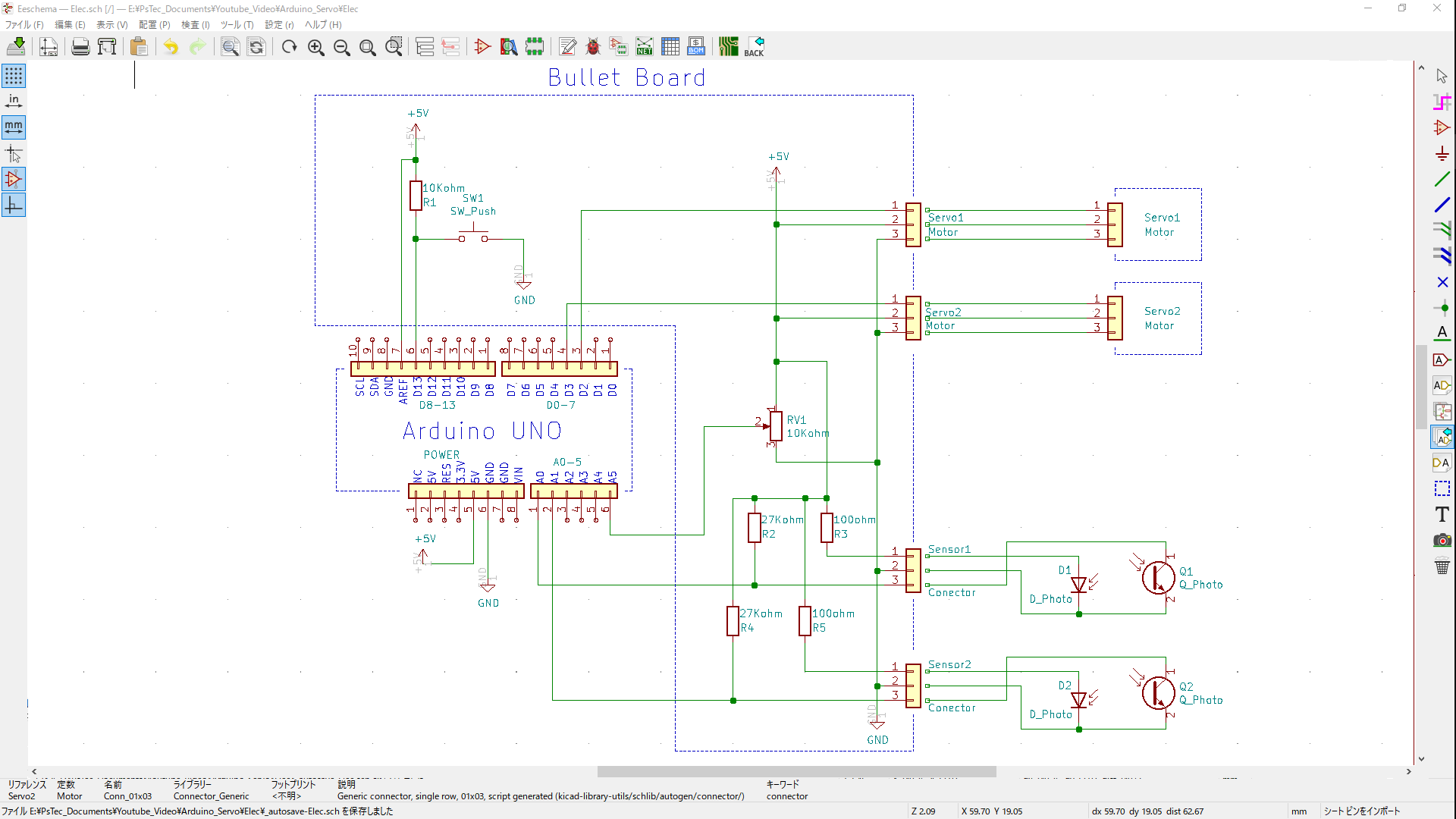 |
回路 |
ArduinoUNO電源 6V〜12V ACアダプタ |
ArduinoUNOの汎用シールドキバンを使って、コネクタまでの配線を作りました。 Arduino UNO互換機でもOKです。 入力はボリュームとプッシュスイッチです。 センサは透過回路用に組んでいます。 |
 |
ソフト |
センサ検出付き 自動往復運転 加減速あり |
動作は簡単なセンサ検出による往復運転です。 加減速率や停車時間はソース内の定数変更でできます。 |
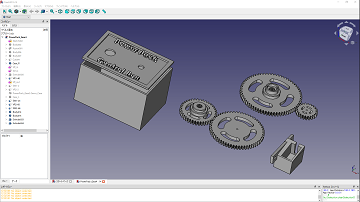 |
PowerPackギヤ ケース |
サーボケースは、PowerPack本体に ネジ止め 他は全て差込のみで取付 材料:PLA |
サーボケースは1種類ですが、 印刷時に対称にしてもう一つ印刷します。 サーボサイズ: 22mm x 12mm |
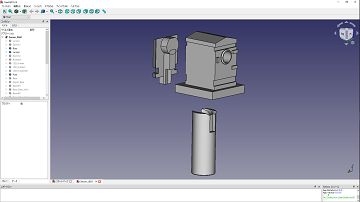 |
光センサケース | センサは発光も受光もΦ3の. 砲弾型を使用 |
ケーブルの取り出しは、Bossのくぼみに沿って下に出します。 受発光とも同じケースです。 |
|
|
P'sTecではカスタムオーダーの業務もお受けしていますのでご相談下さい。 |
||
|
この Web サイトに関するご質問やご感想などについては、info@ps-tec.jpまで電子メールでお送りください。
|
