![]()

![]()
![]()
![]()
|
|
|
|
1.サンプルソフト動作説明PWM PowerPack 031〜 ArduinoUNOパワーパックでは、2点のセンサー入力があります。 このセンサー検出を起点に動作指令をできます。 以下説明では、サンプルソフトに組み込まれている内容を説明しますので、 ユーザーレイアウトと同じ動作であればそのままダウンロードして頂ければ走行出来ます。
サンプルソフトでは上記設定を変更できます。 この自動運転で以下の様なレイアウトに対応できます。
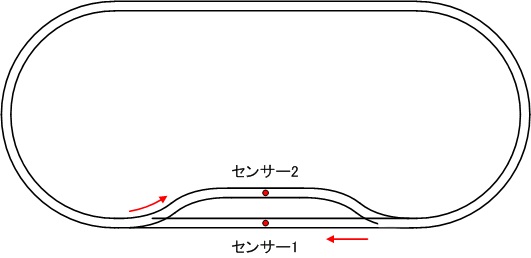
直線レール上を、センサーの間で往復運転します。 動作モード1 直線レール以外にも以下の様なレイアウトでも往復運転は出来ます。
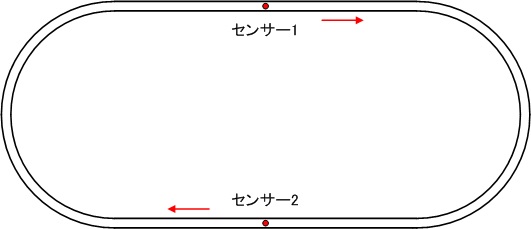
自動運転2 円形レール上で2箇所の駅に停車、発車の連続運転 動作モード2
|
|
この Web サイトに関するご質問やご感想などについては、info@ps-tec.jpまで電子メールでお送りください。
|